ML4428 Overview
Description
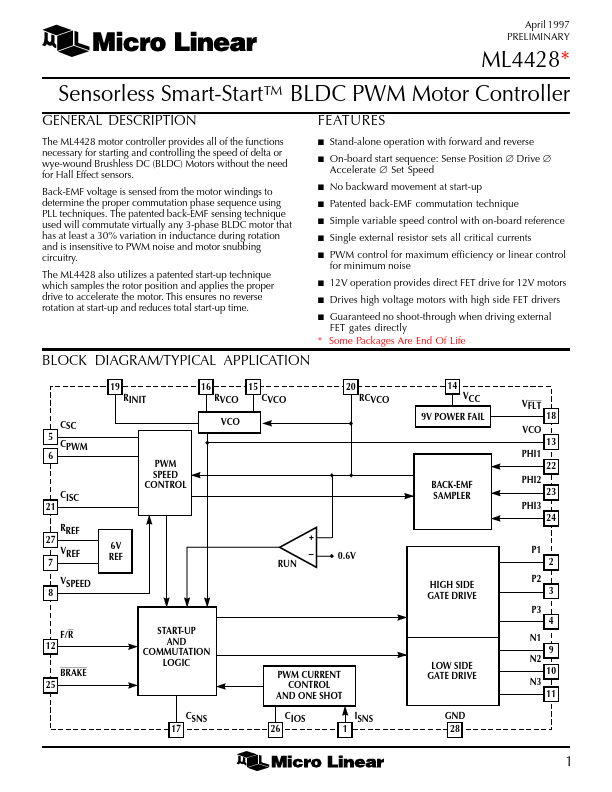
The ML4428 motor controller provides all of the functions necessary for starting and controlling the speed of delta or wye-wound Brushless DC (BLDC) Motors without the need for Hall Effect sensors. Back-EMF voltage is sensed from the motor windings to determine the proper commutation phase sequence using PLL techniques.