- Part: TMS417809
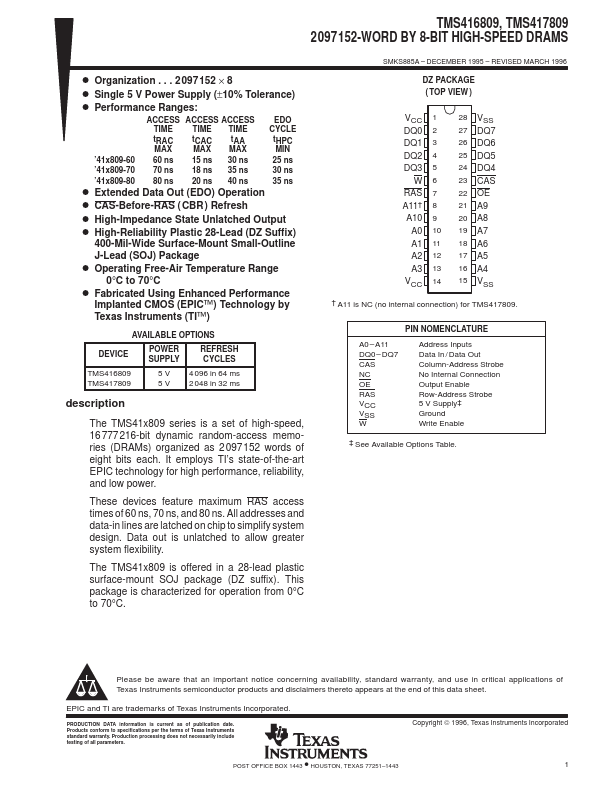
- Description: HIGH-SPEED DRAMS
- Manufacturer: Texas Instruments
- Size: 384.48 KB
Related Texas Instruments Datasheets
| Part Number | Description |
|---|---|
| TMS417809A | DYNAMIC RANDOM-ACCESS MEMORIES |
| TMS417800 | HIGH-SPEED DRAMS |
| TMS417800A | DYNAMIC RANDOM-ACCESS MEMORIES |
| TMS417400 | 4194304-WORD BY 4-BIT HIGH-SPEED DRAMS |
| TMS417400A | DYNAMIC RANDOM-ACCESS MEMORIES |